Agent-based Transportaion Model
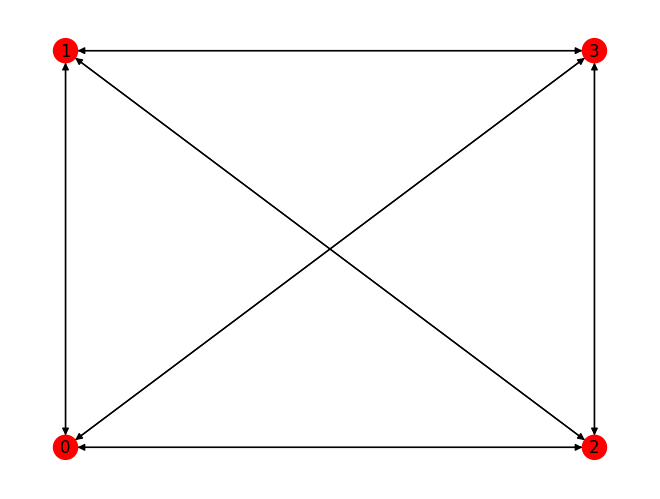
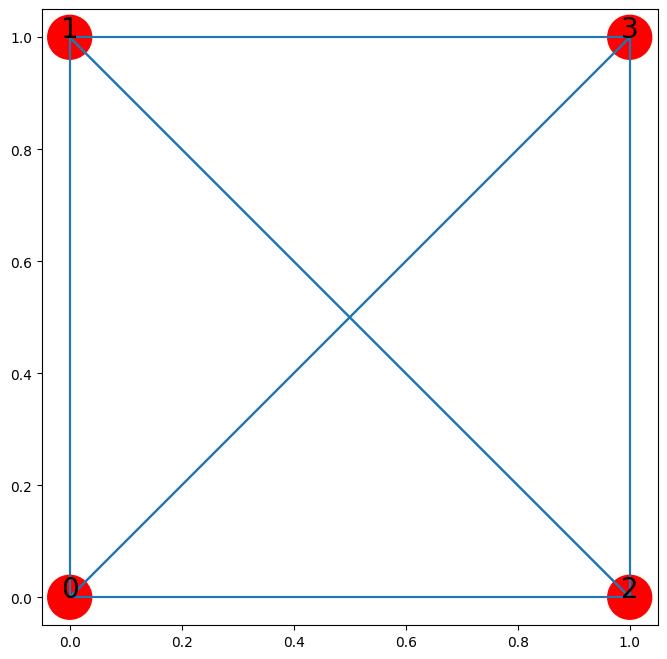
Let’s create a simple agent-based transportation model. First, start with a transportation network. Our transportation network can be created as a Networkx Graph or a (Geo)Pandas (Geo)DataFrame. There are some sample transportation networks available in dpd.mapping.samples. Real-life networks can be imported from OpenStreetMap via pyrosm.
networkx provides the ability to compute a path from any node to another node. When using OpenStreetMap, the same can be accomplished via the Open Source Routing Machine.
To create a couple agents, we can create some transportation zones. For simplicity, we will create one zone per node with three Production and three Attraction so each zone has one person that goes to each other zone. Below are some other DataFrames we can generate from the Zones DataFrame. Also, we will create a path for each person using networkx.
/tmp/ipykernel_2318/4093024280.py:12: FutureWarning: You are adding a column named 'geometry' to a GeoDataFrame constructed without an active geometry column. Currently, this automatically sets the active geometry column to 'geometry' but in the future that will no longer happen. Instead, either provide geometry to the GeoDataFrame constructor (GeoDataFrame(... geometry=GeoSeries()) or use `set_geometry('geometry')` to explicitly set the active geometry column.
zones["geometry"] = nodes_df["geometry"]
|
Name |
Production |
Attraction |
geometry |
| 0 |
Zone 0 |
3 |
3 |
POINT (0.00000 0.00000) |
| 1 |
Zone 1 |
3 |
3 |
POINT (0.00000 1.00000) |
| 2 |
Zone 2 |
3 |
3 |
POINT (1.00000 0.00000) |
| 3 |
Zone 3 |
3 |
3 |
POINT (1.00000 1.00000) |
|
0 |
1 |
2 |
3 |
| 0 |
0.000000 |
111195.080234 |
111195.080234 |
157249.598474 |
| 1 |
111195.080234 |
0.000000 |
157249.598474 |
111195.080234 |
| 2 |
111195.080234 |
157249.598474 |
0.000000 |
111178.144254 |
| 3 |
157249.598474 |
111195.080234 |
111178.144254 |
0.000000 |
|
0 |
1 |
2 |
3 |
| 0 |
1 |
1 |
1 |
1 |
| 1 |
1 |
1 |
1 |
1 |
| 2 |
1 |
1 |
1 |
1 |
| 3 |
1 |
1 |
1 |
1 |
|
origin |
destination |
| 1 |
0 |
1 |
| 2 |
0 |
2 |
| 3 |
0 |
3 |
| 4 |
1 |
0 |
| 6 |
1 |
2 |
| 7 |
1 |
3 |
| 8 |
2 |
0 |
| 9 |
2 |
1 |
| 11 |
2 |
3 |
| 12 |
3 |
0 |
| 13 |
3 |
1 |
| 14 |
3 |
2 |
|
origin |
destination |
node_ids |
| 1 |
0 |
1 |
[0, 1] |
| 2 |
0 |
2 |
[0, 2] |
| 3 |
0 |
3 |
[0, 3] |
| 4 |
1 |
0 |
[1, 0] |
| 6 |
1 |
2 |
[1, 2] |
| 7 |
1 |
3 |
[1, 3] |
| 8 |
2 |
0 |
[2, 0] |
| 9 |
2 |
1 |
[2, 1] |
| 11 |
2 |
3 |
[2, 3] |
| 12 |
3 |
0 |
[3, 0] |
| 13 |
3 |
1 |
[3, 1] |
| 14 |
3 |
2 |
[3, 2] |
Next, we setup and run our agent-based model. We need to tranform our transportation network in to Python objects for Edges and Nodes. Again, this can be done with either a Graph or a (Geo)DataFrame.
|
|
position |
geometry |
time |
| Step |
AgentID |
|
|
|
| 0 |
afd36ad1-4665-4b6a-81cf-af67f39be7e6 |
0.000000 |
POINT (0.00000 0.00000) |
0 |
| 479b4718-ea8e-43bb-918d-98edf30d3c50 |
0.000000 |
POINT (0.00000 0.00000) |
0 |
| 240181c8-bcb6-42de-a59a-b45948143715 |
0.000000 |
POINT (0.00000 0.00000) |
0 |
| 7a225691-db1c-4656-aee1-57c291c2228b |
0.000000 |
POINT (0.00000 1.00000) |
0 |
| 8deaa3a1-93b9-4014-89ec-be484eca11cd |
0.000000 |
POINT (0.00000 1.00000) |
0 |
| 6df1a22e-8532-4741-ae8e-af4bdbf59013 |
0.000000 |
POINT (0.00000 1.00000) |
0 |
| eb4fc499-9415-4a6f-8d0b-deaece689ad6 |
0.000000 |
POINT (1.00000 0.00000) |
0 |
| 17f3b59f-b927-45ac-a08d-c8651933630c |
0.000000 |
POINT (1.00000 0.00000) |
0 |
| 683d8b89-6c59-4a20-b64f-b1c963b0d4a5 |
0.000000 |
POINT (1.00000 0.00000) |
0 |
| 8a8f0a59-f416-45be-a384-39d3e5d0de94 |
0.000000 |
POINT (1.00000 1.00000) |
0 |
| 31d004fd-6e90-4cd7-ad54-dd60853b3d48 |
0.000000 |
POINT (1.00000 1.00000) |
0 |
| 64b4c84e-e27d-47d5-8c82-f60d7495fcc1 |
0.000000 |
POINT (1.00000 1.00000) |
0 |
| 1 |
afd36ad1-4665-4b6a-81cf-af67f39be7e6 |
0.200000 |
POINT (0.00000 0.20000) |
1 |
| 479b4718-ea8e-43bb-918d-98edf30d3c50 |
0.200000 |
POINT (0.20000 0.00000) |
1 |
| 240181c8-bcb6-42de-a59a-b45948143715 |
0.200000 |
POINT (0.14142 0.14142) |
1 |
| 7a225691-db1c-4656-aee1-57c291c2228b |
0.200000 |
POINT (0.00000 0.80000) |
1 |
| 8deaa3a1-93b9-4014-89ec-be484eca11cd |
0.200000 |
POINT (0.14142 0.85858) |
1 |
| 6df1a22e-8532-4741-ae8e-af4bdbf59013 |
0.200000 |
POINT (0.20000 1.00000) |
1 |
| eb4fc499-9415-4a6f-8d0b-deaece689ad6 |
0.200000 |
POINT (0.80000 0.00000) |
1 |
| 17f3b59f-b927-45ac-a08d-c8651933630c |
0.200000 |
POINT (0.85858 0.14142) |
1 |
| 683d8b89-6c59-4a20-b64f-b1c963b0d4a5 |
0.200000 |
POINT (1.00000 0.20000) |
1 |
| 8a8f0a59-f416-45be-a384-39d3e5d0de94 |
0.200000 |
POINT (0.85858 0.85858) |
1 |
| 31d004fd-6e90-4cd7-ad54-dd60853b3d48 |
0.200000 |
POINT (0.80000 1.00000) |
1 |
| 64b4c84e-e27d-47d5-8c82-f60d7495fcc1 |
0.200000 |
POINT (1.00000 0.80000) |
1 |
| 2 |
afd36ad1-4665-4b6a-81cf-af67f39be7e6 |
0.500000 |
POINT (0.00000 0.50000) |
2 |
| 479b4718-ea8e-43bb-918d-98edf30d3c50 |
0.500000 |
POINT (0.50000 0.00000) |
2 |
| 240181c8-bcb6-42de-a59a-b45948143715 |
0.500000 |
POINT (0.35355 0.35355) |
2 |
| 7a225691-db1c-4656-aee1-57c291c2228b |
0.500000 |
POINT (0.00000 0.50000) |
2 |
| 8deaa3a1-93b9-4014-89ec-be484eca11cd |
0.500000 |
POINT (0.35355 0.64645) |
2 |
| 6df1a22e-8532-4741-ae8e-af4bdbf59013 |
0.500000 |
POINT (0.50000 1.00000) |
2 |
| eb4fc499-9415-4a6f-8d0b-deaece689ad6 |
0.500000 |
POINT (0.50000 0.00000) |
2 |
| 17f3b59f-b927-45ac-a08d-c8651933630c |
0.500000 |
POINT (0.64645 0.35355) |
2 |
| 683d8b89-6c59-4a20-b64f-b1c963b0d4a5 |
0.500000 |
POINT (1.00000 0.50000) |
2 |
| 8a8f0a59-f416-45be-a384-39d3e5d0de94 |
0.500000 |
POINT (0.64645 0.64645) |
2 |
| 31d004fd-6e90-4cd7-ad54-dd60853b3d48 |
0.500000 |
POINT (0.50000 1.00000) |
2 |
| 64b4c84e-e27d-47d5-8c82-f60d7495fcc1 |
0.500000 |
POINT (1.00000 0.50000) |
2 |
| 3 |
afd36ad1-4665-4b6a-81cf-af67f39be7e6 |
0.816228 |
POINT (0.00000 0.81623) |
3 |
| 479b4718-ea8e-43bb-918d-98edf30d3c50 |
0.816228 |
POINT (0.81623 0.00000) |
3 |
| 240181c8-bcb6-42de-a59a-b45948143715 |
0.900000 |
POINT (0.63640 0.63640) |
3 |
| 7a225691-db1c-4656-aee1-57c291c2228b |
0.816228 |
POINT (0.00000 0.18377) |
3 |
| 8deaa3a1-93b9-4014-89ec-be484eca11cd |
0.900000 |
POINT (0.63640 0.36360) |
3 |
| 6df1a22e-8532-4741-ae8e-af4bdbf59013 |
0.816228 |
POINT (0.81623 1.00000) |
3 |
| eb4fc499-9415-4a6f-8d0b-deaece689ad6 |
0.816228 |
POINT (0.18377 0.00000) |
3 |
| 17f3b59f-b927-45ac-a08d-c8651933630c |
0.900000 |
POINT (0.36360 0.63640) |
3 |
| 683d8b89-6c59-4a20-b64f-b1c963b0d4a5 |
0.816228 |
POINT (1.00000 0.81623) |
3 |
| 8a8f0a59-f416-45be-a384-39d3e5d0de94 |
0.900000 |
POINT (0.36360 0.36360) |
3 |
| 31d004fd-6e90-4cd7-ad54-dd60853b3d48 |
0.816228 |
POINT (0.18377 1.00000) |
3 |
| 64b4c84e-e27d-47d5-8c82-f60d7495fcc1 |
0.816228 |
POINT (1.00000 0.18377) |
3 |
| 4 |
240181c8-bcb6-42de-a59a-b45948143715 |
1.220691 |
POINT (0.86316 0.86316) |
4 |
| 8deaa3a1-93b9-4014-89ec-be484eca11cd |
1.220691 |
POINT (0.86316 0.13684) |
4 |
| 17f3b59f-b927-45ac-a08d-c8651933630c |
1.220691 |
POINT (0.13684 0.86316) |
4 |
| 8a8f0a59-f416-45be-a384-39d3e5d0de94 |
1.220691 |
POINT (0.13684 0.13684) |
4 |
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/dpd/envs/latest/lib/python3.9/site-packages/movingpandas/trajectory.py:166: MissingCRSWarning: Trajectory generated without CRS. Computations will use Euclidean distances.
warnings.warn(
Make this Notebook Trusted to load map: File -> Trust Notebook